第 7 章 用参数驱动 Go2 运动¶
上一章我们已经把
Twist和 Go2 的Request接口接通了。这一章换一条更直接的路:不再走/cmd_vel,而是写一个最小控制节点go2_ctrl,用 ROS2 参数驱动 Go2,底层走的是 Topic 通信。
📡 本章通信方式:Topic(话题发布)
形状:单向 · 异步广播 · 持续发布
本章关键 API:self.create_publisher(Request, "/api/sport/request", 10)
要记住的事:节点每 0.1 秒往话题上发一条 Request,谁订阅谁收;没人订阅它也照发不误。Topic 不关心"消息有没有被处理完",只负责把数据流源源不断推出去。
这是 ROS2 三大通信机制里最基础的一种。下一章我们会看到不一样的形状——Service(请求/响应)。
本章你将学到¶
- 看懂
go2_ctrl这类"参数 + 定时器 + 专有消息"的最小控制节点 - 学会用
ros2 param set在运行时切换 Go2 的动作 id 和运动参数 - 分清"参数驱动控制"和"
/cmd_vel桥接控制"是两条不同的工程链路
背景与原理¶
前面几章里,我们已经见过 Go2 的高层控制入口 /api/sport/request。它的特点很鲜明:消息格式是 Go2 专有的 unitree_api/msg/Request,不是 ROS2 生态里常见的 Twist。
这意味着,除了第 4 章那种“先发 Twist,再桥接成 Request”的路线,我们还可以更直接一点:节点自己组织 Request,定时发给机器人。
go2_ctrl 就是这个思路的最小实现。它不读 /odom,不算控制闭环,也不管路径规划。它只做一件事:把当前参数里的动作 id、x/y/z 速度值,持续封装成 Request 并发布出去。
架构总览¶
flowchart LR
A["ros2 param set<br/>修改 sport_api_id / x / y / z"] --> B[go2_ctrl]
B ==>|"📡 Topic:持续发布 10 Hz"| C["/api/sport/request<br/>unitree_api/msg/Request"]
C --> D[Go2 高层运动接口]
classDef topic fill:#e3f2fd,stroke:#1976d2,stroke-width:2px
class C topic这张图里最关键的两件事:
- 外部没有直接往话题发消息,而是先改节点参数;
go2_ctrl把参数翻译成消息再持续推出去 go2_ctrl→/api/sport/request这条粗箭头就是本章的 Topic 通信:单向、持续、不等任何人回应
go2_ctrl 每 0.1 秒读一次参数,再把最新值发到 /api/sport/request。所以你在另一个终端里执行 ros2 param set,机器人动作会马上跟着变。
环境准备¶
开始前先确认三件事:
- 你已经完成第 6 章,能够用
go2_driver_py让 Go2 的底层 ROS2 链路跑起来 - 工作空间里已经有
go2_tutorial_py这个教程包 - 你知道
BALANCESTAND、MOVE、STOPMOVE这些动作 id 都定义在sport_model.py里
本章继续复用教程包 go2_tutorial_py,不新建额外功能包。对应目录结构大致如下:
unitree_go2_ws/
└── src/
└── tutorial/
├── go2_tutorial_inter/
└── go2_tutorial_py/
├── go2_tutorial_py/
│ ├── sport_model.py
│ └── go2_ctrl.py
├── package.xml
└── setup.py
实现步骤¶
步骤一:先把 go2_ctrl 注册成可执行入口¶
这一小步只做一件事:让 ros2 run 能找到我们的控制节点。
在 src/tutorial/go2_tutorial_py/setup.py 里,入口应该像下面这样挂到 console_scripts:
entry_points={
"console_scripts": [
"go2_ctrl = go2_tutorial_py.go2_ctrl:main",
"go2_state = go2_tutorial_py.go2_state:main",
"go2_cruising_service = go2_tutorial_py.go2_cruising_service:main",
"go2_cruising_client = go2_tutorial_py.go2_cruising_client:main",
"go2_nav_client = go2_tutorial_py.go2_nav_client:main",
"go2_nav_server = go2_tutorial_py.go2_nav_server:main",
],
}
这一段的重点不是“会不会写 setup.py”,而是记住:
- 可执行名叫
go2_ctrl - 真正的 Python 模块在
go2_tutorial_py/go2_ctrl.py - 后面所有运行命令都以这个入口为准
步骤二:实现 go2_ctrl.py¶
现在进入主角。接下来这段代码做三件事:
- 声明四个参数:动作 id、线速度
x/y、角速度z - 创建一个
Request发布者,目标话题是/api/sport/request - 用定时器周期性读参数并发消息
把下面代码放进 src/tutorial/go2_tutorial_py/go2_tutorial_py/go2_ctrl.py:
import json # 把 Python 字典转成 JSON 字符串
import rclpy # ROS2 Python 客户端库
from rclpy.node import Node # 所有 ROS2 节点的基类
from unitree_api.msg import Request # Go2 高层控制消息
from .sport_model import ROBOT_SPORT_API_IDS # Go2 动作 id 常量表
class Go2Ctrl(Node):
def __init__(self):
super().__init__("go2_ctrl")
# 四个参数就是这个节点全部的“控制面板”
self.declare_parameter("sport_api_id", ROBOT_SPORT_API_IDS["BALANCESTAND"])
self.declare_parameter("x", 0.0)
self.declare_parameter("y", 0.0)
self.declare_parameter("z", 0.0)
# 直接把 Request 发给 Go2 的高层接口
self.req_pub = self.create_publisher(Request, "/api/sport/request", 10)
# 每 0.1 秒读取一次参数并发送,保证机器人持续收到控制命令
self.timer = self.create_timer(0.1, self.on_timer)
def on_timer(self):
request = Request()
api_id = self.get_parameter("sport_api_id").get_parameter_value().integer_value
request.header.identity.api_id = api_id
if api_id == ROBOT_SPORT_API_IDS["MOVE"]:
params = {
"x": self.get_parameter("x").get_parameter_value().double_value,
"y": self.get_parameter("y").get_parameter_value().double_value,
"z": self.get_parameter("z").get_parameter_value().double_value,
}
request.parameter = json.dumps(params)
self.req_pub.publish(request)
def main():
rclpy.init()
rclpy.spin(Go2Ctrl())
rclpy.shutdown()
if __name__ == "__main__":
main()
这段代码里有两个非常容易记混的点。
第一,sport_api_id 决定"发的是什么动作"。如果你把它设成 1002,那就是 BALANCESTAND;如果设成 1008,那就是 MOVE。
第二,x/y/z 只有在 sport_api_id == MOVE 时才会真的写进 request.parameter。这就是为什么我们改完速度参数后,还得把动作 id 切到 MOVE,机器人才会动起来。
📡 本章 Topic 通信的钥匙就是这一行
create_publisher 就是把这个节点注册为 Topic 发布者。三个参数依次是:消息类型、话题名、队列长度。
配合下一行的 self.create_timer(0.1, self.on_timer),就形成了本章"10 Hz 持续往 Topic 推 Request"的控制链。下一章的 Service 会换成 create_service(...),形状完全不同——那时候你回过头来对比这一行,Topic 和 Service 的分野就会非常清晰。
步骤三:弄清楚四个参数到底怎么配¶
读代码时别急着背整段逻辑,先记住这四个参数各自负责什么:
| 参数名 | 类型 | 作用 |
|---|---|---|
sport_api_id |
整数 | 指定 Go2 执行动作类型 |
x |
浮点数 | 前后线速度,常用于前进/后退 |
y |
浮点数 | 左右线速度,常用于平移 |
z |
浮点数 | 绕 z 轴角速度,常用于原地转向 |
本章最常用的动作 id 可以先记这三个:
| 动作 | id |
|---|---|
BALANCESTAND |
1002 |
STOPMOVE |
1003 |
MOVE |
1008 |
如果你想查更多动作,比如 STANDUP、HELLO、STRETCH,直接去看 sport_model.py 里的字典就行。
步骤四:理解它和第 4 章 twist_bridge 的关系¶
这里很容易脑子打结。我们把两条路线摆在一起看:
| 路线 | 输入 | 中间层 | 输出 |
|---|---|---|---|
| 第 4 章 | /cmd_vel |
go2_twist_bridge_py |
/api/sport/request |
| 第 7 章 | ROS2 参数 | go2_ctrl |
/api/sport/request |
它们最后都落到同一个 Go2 专有接口上,但前端控制方式完全不同。
第 4 章更像“兼容 ROS2 通用生态”;第 7 章更像“直接操作 Go2 原生高层动作”。后面讲 Service 和 Action 时,我们会继续沿着这一章这种“直接控制 Go2 动作”的思路往上封装。
编译与运行¶
先回到工作空间根目录,把教程包重新编译一遍:
# 编译教程通信示例包,并重新加载环境
cd ~/unitree_go2_ws
colcon build --packages-select go2_tutorial_py go2_tutorial_inter
source install/setup.bash
先开第一个终端,把 go2_ctrl 跑起来:
然后开第二个终端,用参数直接驱动它:
# 先切到平衡站立
cd ~/unitree_go2_ws
source install/setup.bash
ros2 param set /go2_ctrl sport_api_id 1002
# 切到 MOVE,并给一个前进速度
ros2 param set /go2_ctrl sport_api_id 1008
ros2 param set /go2_ctrl x 0.3
ros2 param set /go2_ctrl y 0.0
ros2 param set /go2_ctrl z 0.0
# 需要停下时,把动作切回 STOPMOVE
ros2 param set /go2_ctrl sport_api_id 1003
如果你想试原地转向,可以保持 sport_api_id=1008,把 x 设为 0.0,再把 z 设成一个较小的角速度,比如 0.3。
第一次实机调参数时别上大速度
本章的控制链是直接发 Go2 高层动作,不经过额外限幅器。第一次实机测试时,x/y/z 先从 0.1 或 0.2 这种小值开始,旁边留出安全空间,手里握好急停。
结果验证¶
这一章跑通后,你应该能看到三类现象。
第一类是参数层面:
# 查看节点当前参数
ros2 param list /go2_ctrl
ros2 param get /go2_ctrl sport_api_id
ros2 param get /go2_ctrl x
第二类是消息层面:
当 sport_api_id=1008 时,你应该能在 parameter 字段里看到一段 JSON 字符串,里面包含 x/y/z。
第三类是动作层面:
- 设
sport_api_id=1002时,机器人应回到平衡站立 - 设
sport_api_id=1008且x=0.3时,机器人应开始向前匀速运动,速度约 0.3 m/s - 设
sport_api_id=1003时,机器人应停止运动
结果演示¶
下面这张图展示的是把 x 调到 0.3 后,Go2 通过 Topic 控制向前走的实机结果。它对应的是本章最核心的验证点:ros2 param set 改的是节点参数,节点再把参数组合成 /api/sport/request,最后才落到 Go2 的高层运动接口。
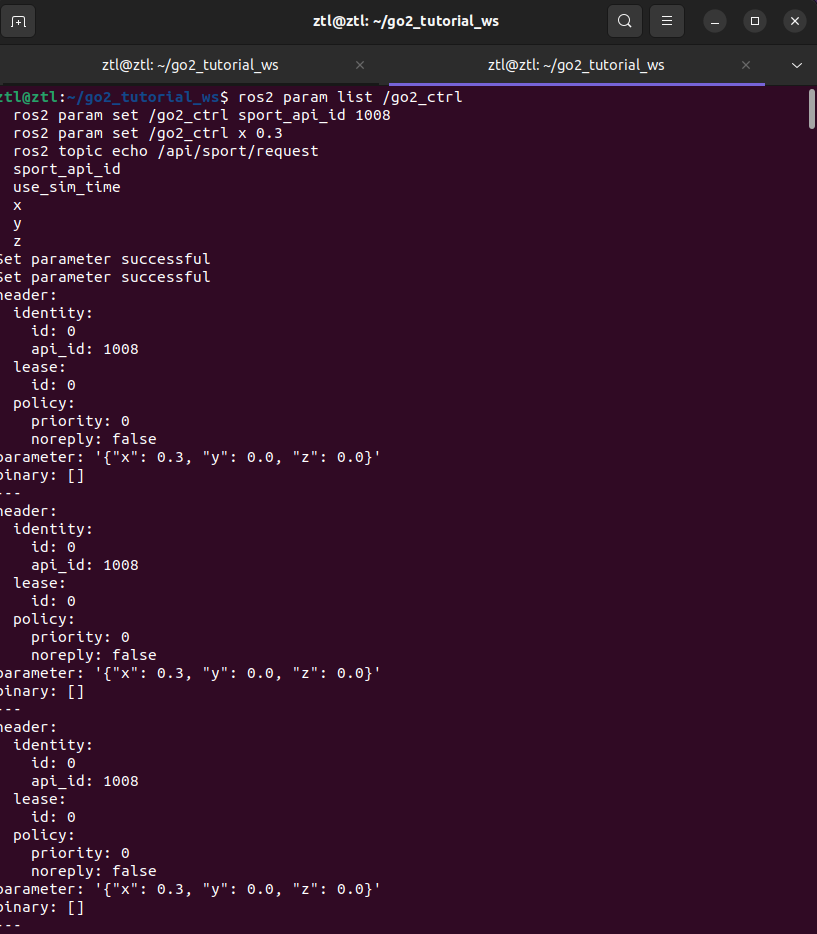
想自己调着玩?高亮的就是可改的入口
上面凡是用 黄底高亮 的数值,都是你可以通过 ros2 param set /go2_ctrl ... 现场改的参数。推荐第一次实机时的安全范围:
x(前后线速度):先从0.1~0.3试起,不要超过0.5y(左右线速度):同样0.1~0.3,想侧移再开z(偏航角速度):0.2~0.5即可观察到明显转向
每次改参数前先确认 sport_api_id=1008,否则 x/y/z 再怎么改机器人也不会动。调完记得切回 sport_api_id=1003 正式停车。
停运动 ≠ 停节点
教材里"让机器人停下来"和"关掉节点"是两件不同的事,别搞混:
- 停止机器人运动:
ros2 param set /go2_ctrl sport_api_id 1003(STOPMOVE,这是正式停车方式) - 结束节点进程:在运行
go2_ctrl的终端按 Ctrl+C
实机场景下应当优先走 1003——先让 Go2 正常收到停车命令,再关节点。直接 Ctrl-C 会让进程立即退出,最后一条控制消息可能还没发出去,机器人可能还在按上一条指令继续动作。
常见问题¶
1. ros2 param set 成功了,但机器人完全没反应¶
现象:终端显示参数设置成功,但 Go2 没动作。
原因:最常见的是你只改了 x/y/z,却没把 sport_api_id 切到 MOVE。
解决:
- 先执行
ros2 param get /go2_ctrl sport_api_id - 确认它是不是
1008 - 如果不是,先
ros2 param set /go2_ctrl sport_api_id 1008
2. 机器人一直走,不肯停¶
现象:你把 x 改回 0.0,但机器人还在动作链里。
原因:go2_ctrl 不是“速度一归零就自动停”的写法,它会继续按当前动作 id 发消息。
解决:
- 显式执行
ros2 param set /go2_ctrl sport_api_id 1003 - 把动作切到
STOPMOVE
3. ros2 run 找不到 go2_ctrl¶
现象:ros2 run go2_tutorial_py go2_ctrl 报找不到可执行入口。
原因:通常是 setup.py 的 console_scripts 没注册,或者编译后当前终端没重新 source。
解决:
- 检查
setup.py里有没有go2_ctrl = go2_tutorial_py.go2_ctrl:main - 重新执行
colcon build --packages-select go2_tutorial_py - 重新
source install/setup.bash
4. 改了参数,但 /api/sport/request 里还是旧值¶
现象:参数已经变了,话题里却没看到更新。
原因:大多不是参数没生效,而是你看的那一帧刚好是旧消息。
解决:
- 用
ros2 topic echo /api/sport/request持续观察几帧 - 再执行一次
ros2 param set - 确认
go2_ctrl进程还在运行,没有被你中途退出
本章小结¶
这一章我们第一次写出了一个真正“直接控制 Go2”的最小 ROS2 节点。
它的结构并不复杂:四个参数、一个 Request 发布者、一个定时器。真正值得记住的,是这种工程思路:节点自己维护控制状态,再周期性把状态刷到机器人接口上。
后面你会看到,Service 和 Action 虽然接口形式不同,但它们也都离不开这种“内部有状态,外部给命令”的套路。
下一步¶
现在我们已经能手动用参数驱动 Go2 了,但每次都敲 ros2 param set 还是太原始。下一章我们把它封装成一个 Service,让“开始巡航 / 停止巡航”变成一次请求、一条响应的短事务。